Notice:


People
Tao Du
Computer graphics, machine learning, robotics
 About Me
About Me
I am an Assistant Professor at the Institute for Interdisciplinary Information Sciences (IIIS), . My research combines physics simulation, machine learning, and numerical optimization techniques to solve real-world inverse dynamics problems, e.g., for graphics and robotics research, developing computational design pipelines for real-world robots, and of dynamic systems.
Before joining Tsinghua, I was a Postdoctoral Associate at , advised by and . I completed my Ph.D. in Computer Science at under the supervision of . I obtained my Master's in Computer Science from and my Bachelor's in Computer Software from .
To prospective students: I am actively looking for students to work on topics in computer graphics, machine learning, and robotics. Students with relevant backgrounds in math, physics, and computer science are all welcome to contact me. Please feel free to drop me an email if you are interested.
Publications
* indicates equal contributions. See my page for an up-to-date list.

Computational Biomimetics of Winged Seeds
, Jiamu Bu, Yanke Qu, , Tao Du. ACM Transactions on Graphics 2024 (SIGGRAPH Asia 2024)
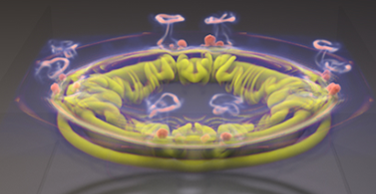
Solid-Fluid Interaction on Particle Flow Maps
, , Junwei Zhou, , Tao Du, . ACM Transactions on Graphics 2024 (SIGGRAPH Asia 2024)
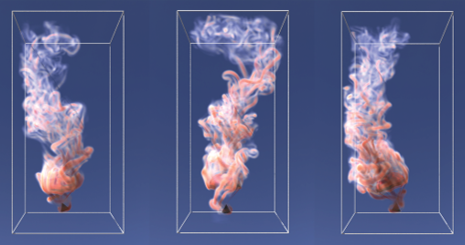
An Impulse Ghost Fluid Method for Simulating Two-Phase Flows
, Linglai Chen, Weiyuan Zeng, Tao Du, , . ACM Transactions on Graphics 2024 (SIGGRAPH Asia 2024)
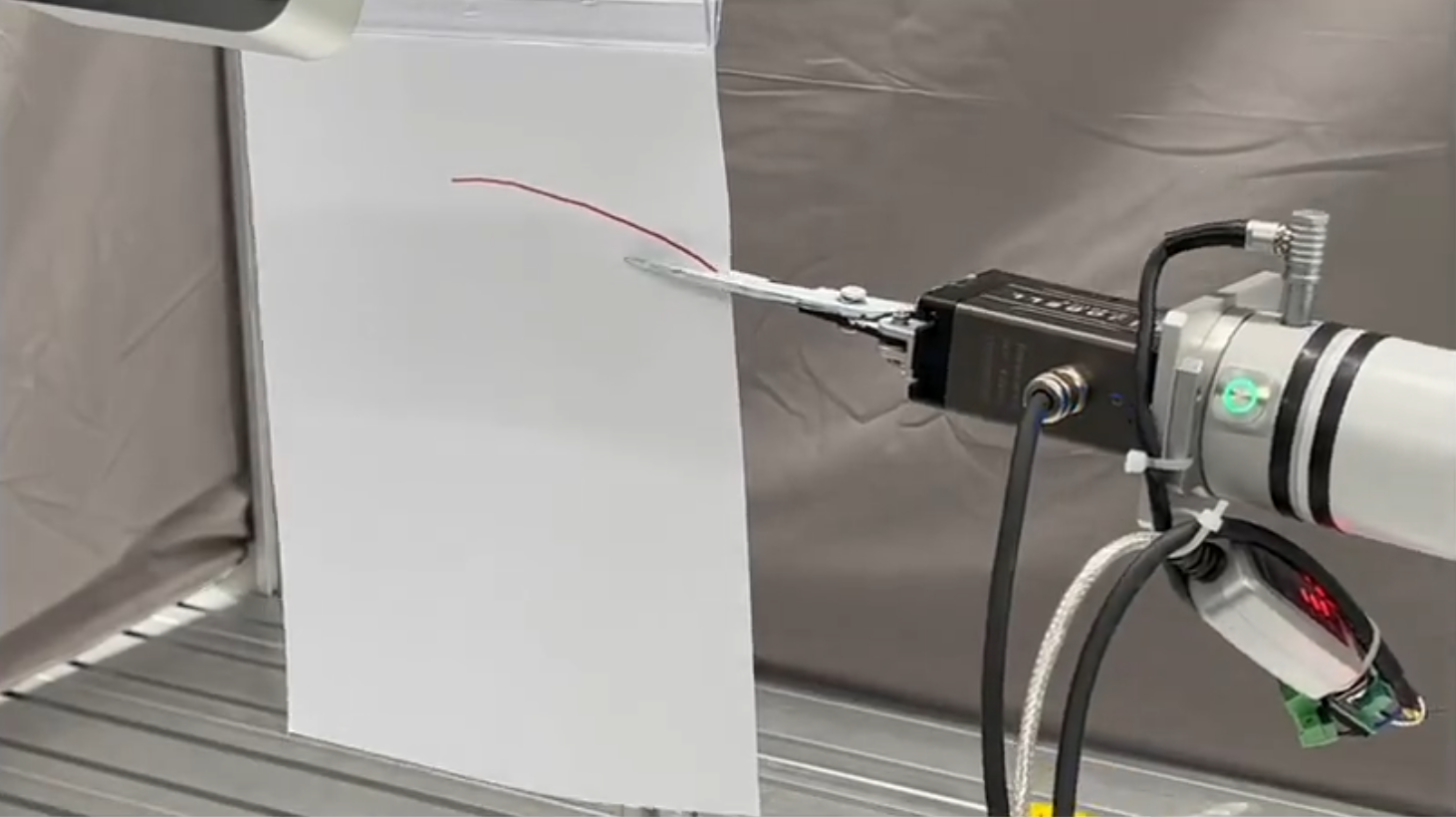
ScissorBot: Learning Generalizable Scissor Skill for Paper Cutting via Simulation, Imitation, and Sim2Real
, Yuxing Chen, Tao Du, Feng Zhu, Huiquan Liu, , . CoRL 2024
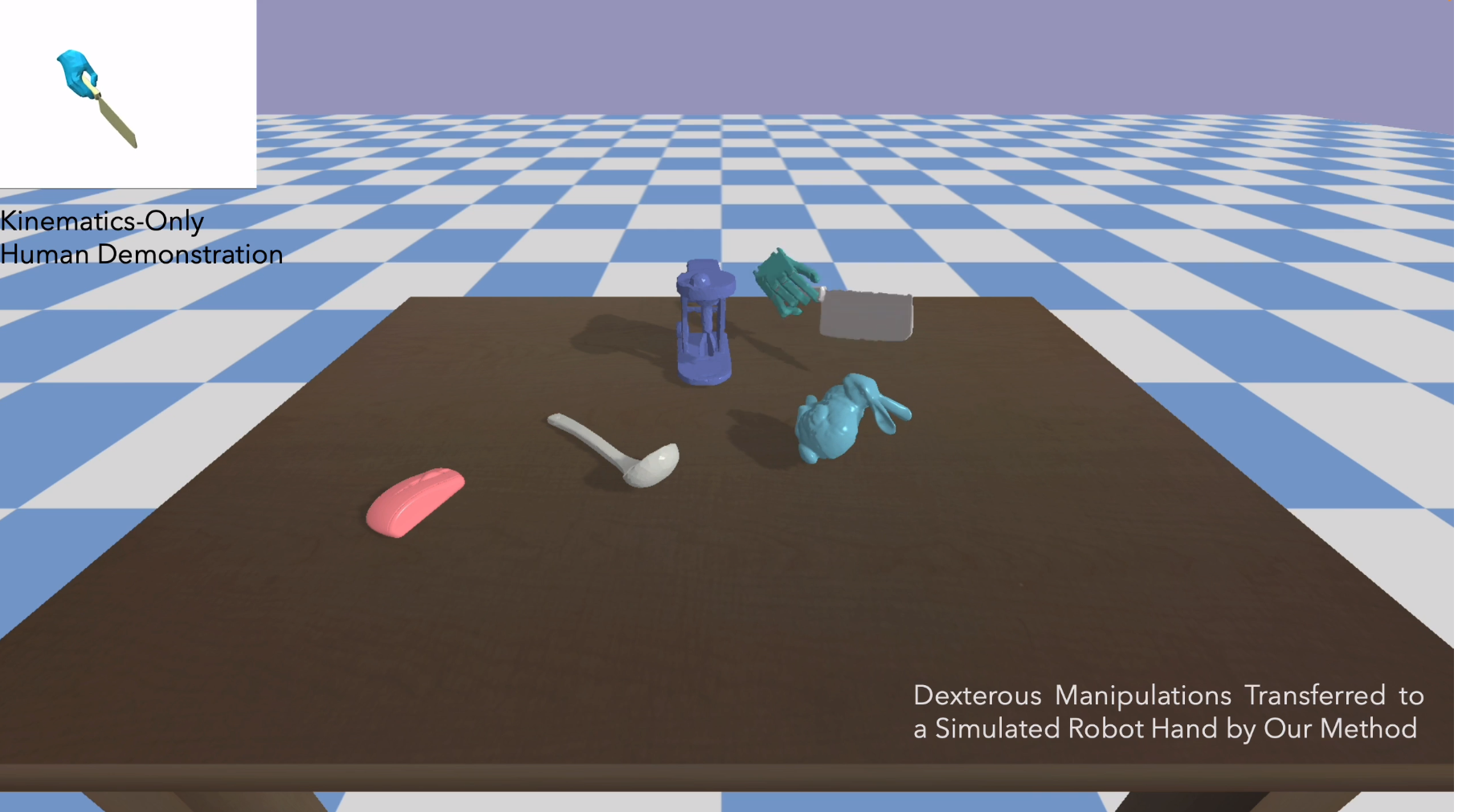
QuasiSim: Parameterized Quasi-Physical Simulators for Dexterous Manipulations Transfer
, Kangbo Lyu, Jieqiong Zhang, Tao Du, . ECCV 2024

Second-Order Finite Elements for Deformable Surfaces
, , Jiamu Bu, , Tao Du. SIGGRAPH Asia 2023 (Conference track)
Learning Preconditioners for Conjugate Gradient PDE Solvers
, , Tao Du, . ICML 2023

Learning Neural Constitutive Laws from Motion Observations for Generalizable PDE Dynamics
, , , , Tao Du, , . ICML 2023
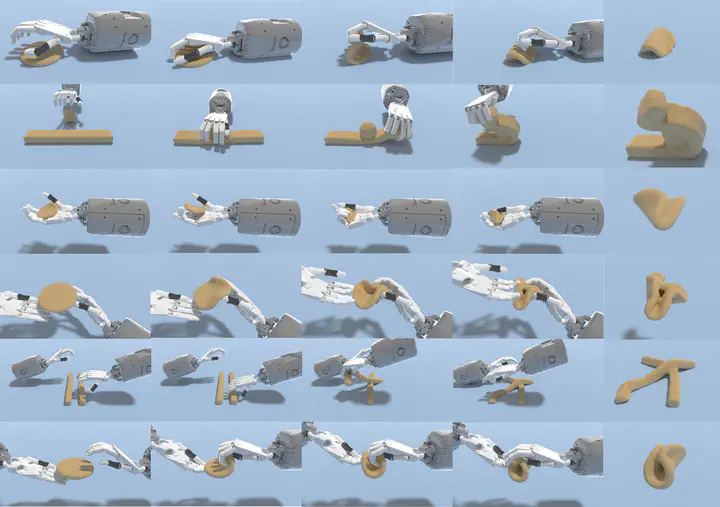
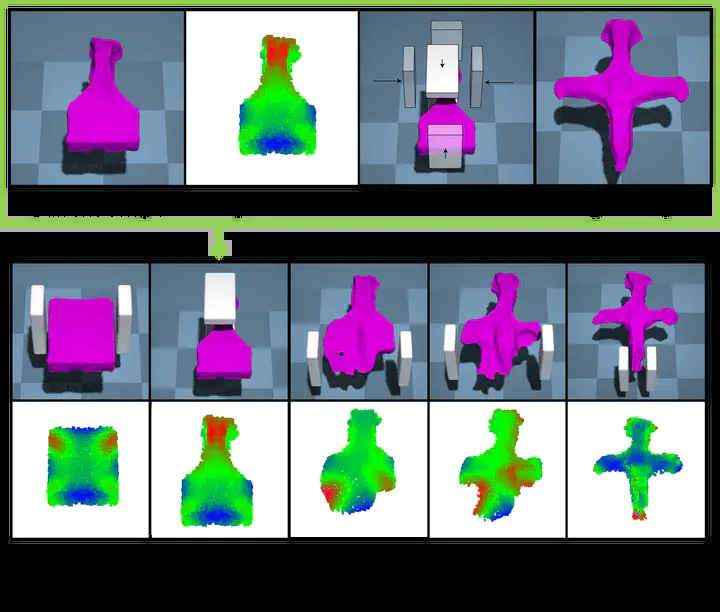
DexDeform: Dexterous Deformable Object Manipulation with Human Demonstrations and Differentiable Physics
*, *, , Tao Du, , , . ICLR 2023

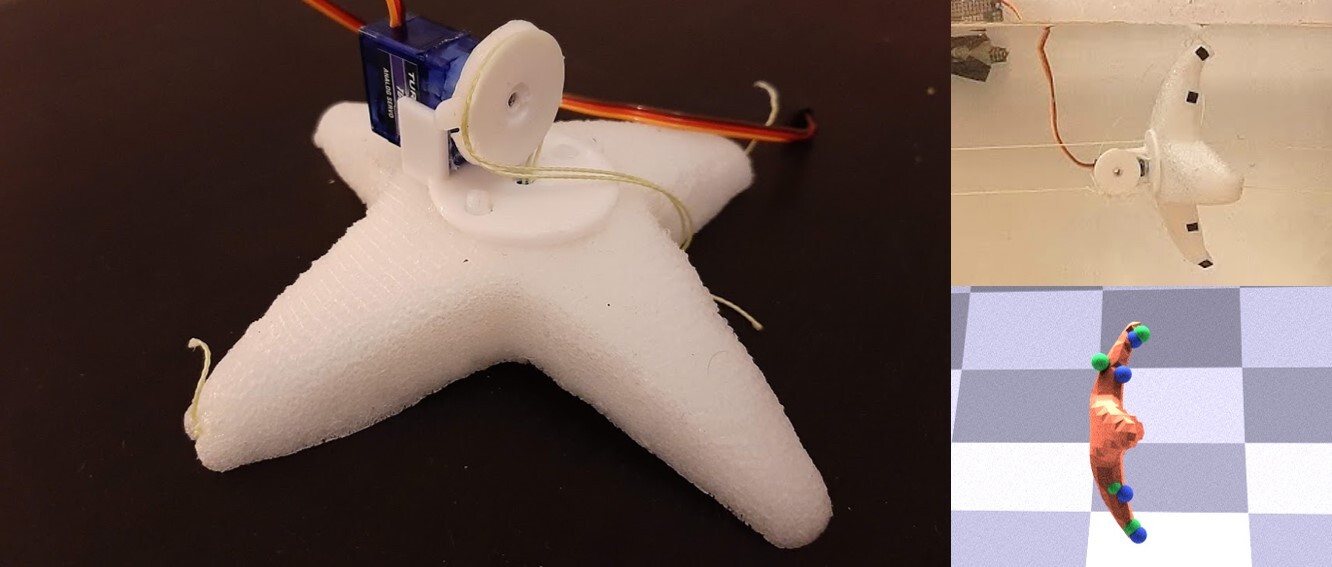
Sim2Real for Soft Robotic Fish via Differentiable Simulation
, Yu Zhang, , , Tao Du, , . IROS 2022
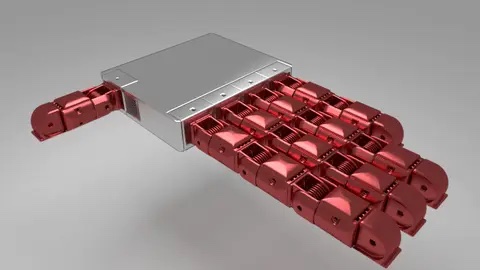
Automatic Co-Design of Aerial Robots Using a Graph Grammar
Allan Zhao, Tao Du, , , Juan Salazar, , , , . IROS 2022
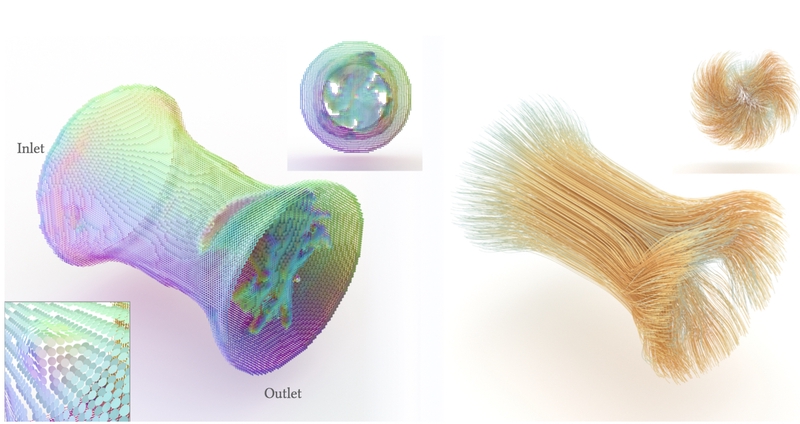
Fluidic Topology Optimization with an Anisotropic Mixture Model
, Tao Du, , , , , . ACM Transactions on Graphics 2022 (SIGGRAPH Asia 2022)
Fast Aquatic Swimmer Optimization with Differentiable Projective Dynamics and Neural Network Hydrodynamic Models
, , , Tao Du, , , , , ICML 2022

DiffCloth: Differentiable Cloth Simulation with Dry Frictional Contact
, Tao Du, , , . ACM Transactions on Graphics 2022 (SIGGRAPH 2022)
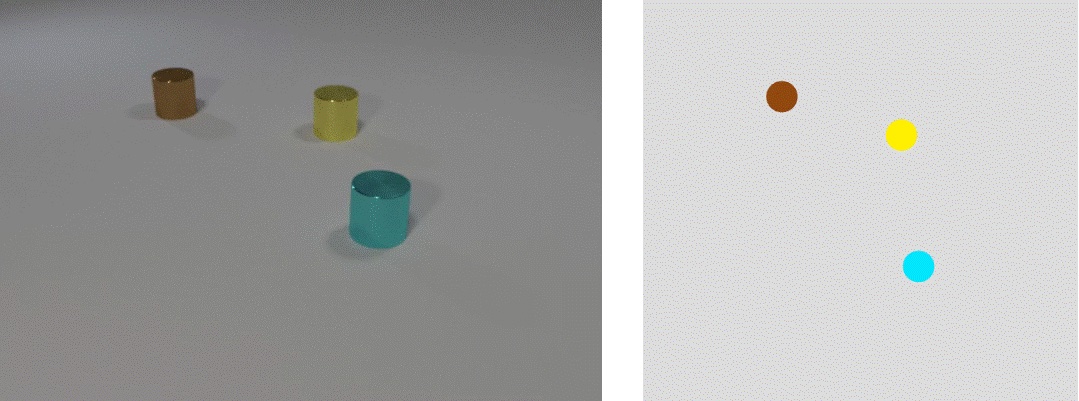
RISP: Rendering-Invariant State Predictor with Differentiable Simulation and Rendering for Cross-Domain Parameter Estimation
*, Tao Du*, , , . ICLR 2022 (Oral)
Contact Points Discovery for Soft-Body Manipulations with Differentiable Physics
*, *, Tao Du, , , . ICLR 2022 (Spotlight)
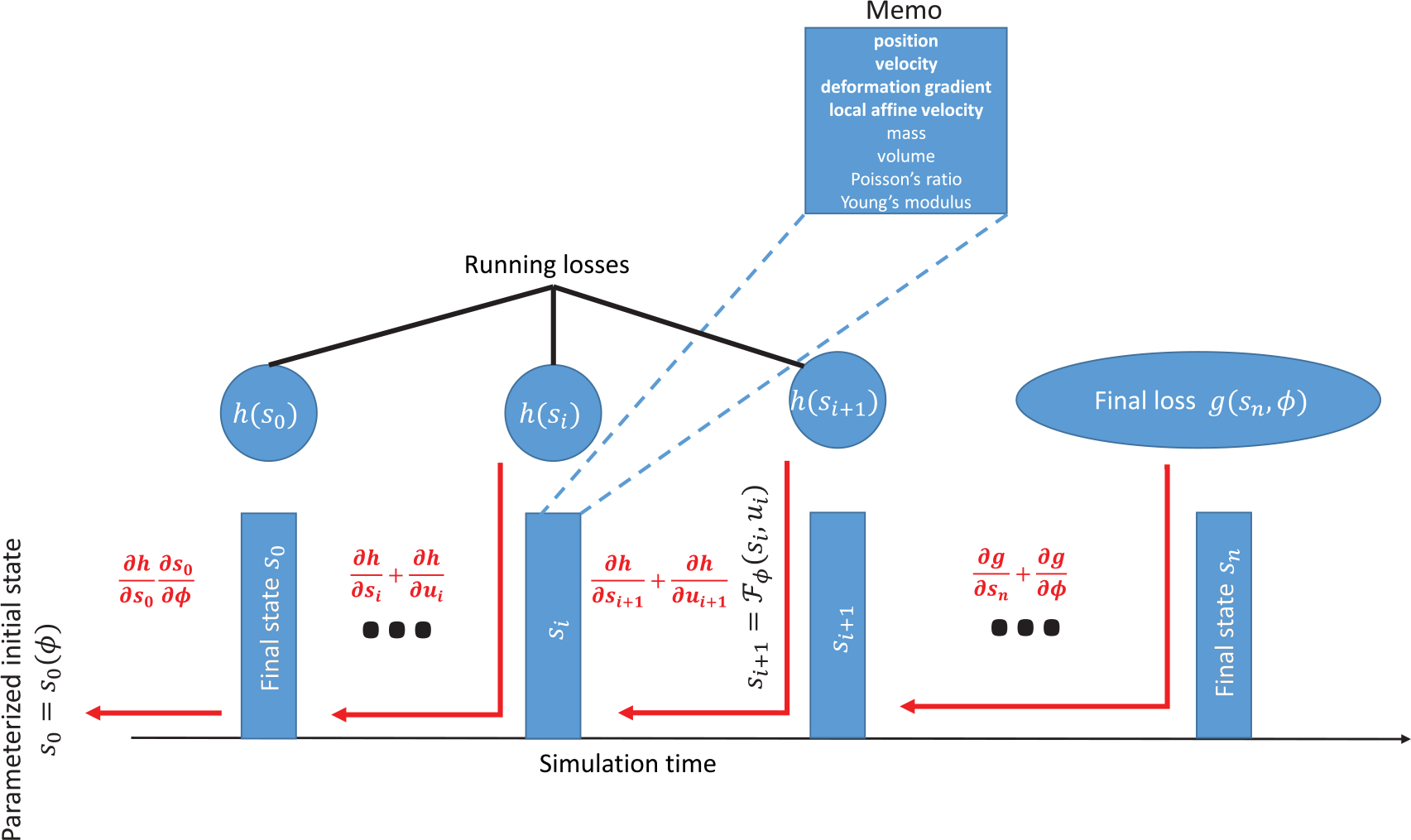
DiffPD: Differentiable Projective Dynamics
Tao Du, , , , , , . ACM Transactions on Graphics 2022 (SIGGRAPH 2022)
Dynamic Visual Reasoning by Learning Differentiable Physics Models from Video and Language
, , Tao Du, , , . NeurIPS 2021
Advanced Soft Robot Modeling in ChainQueen
, Tao Du, , , . Robotica 2021
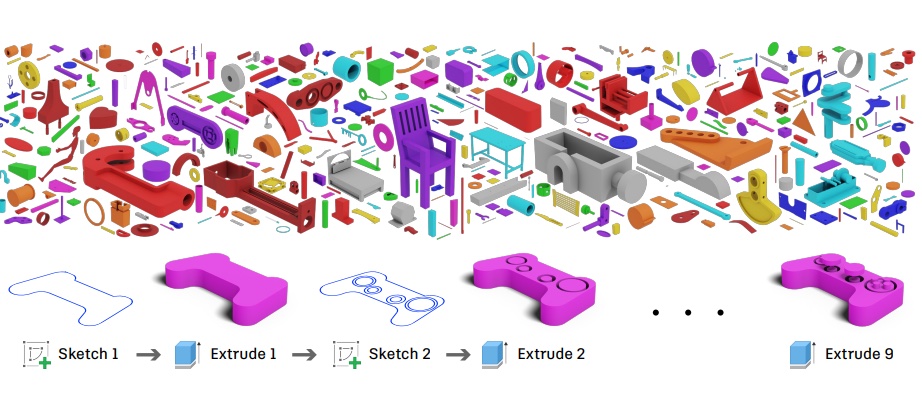
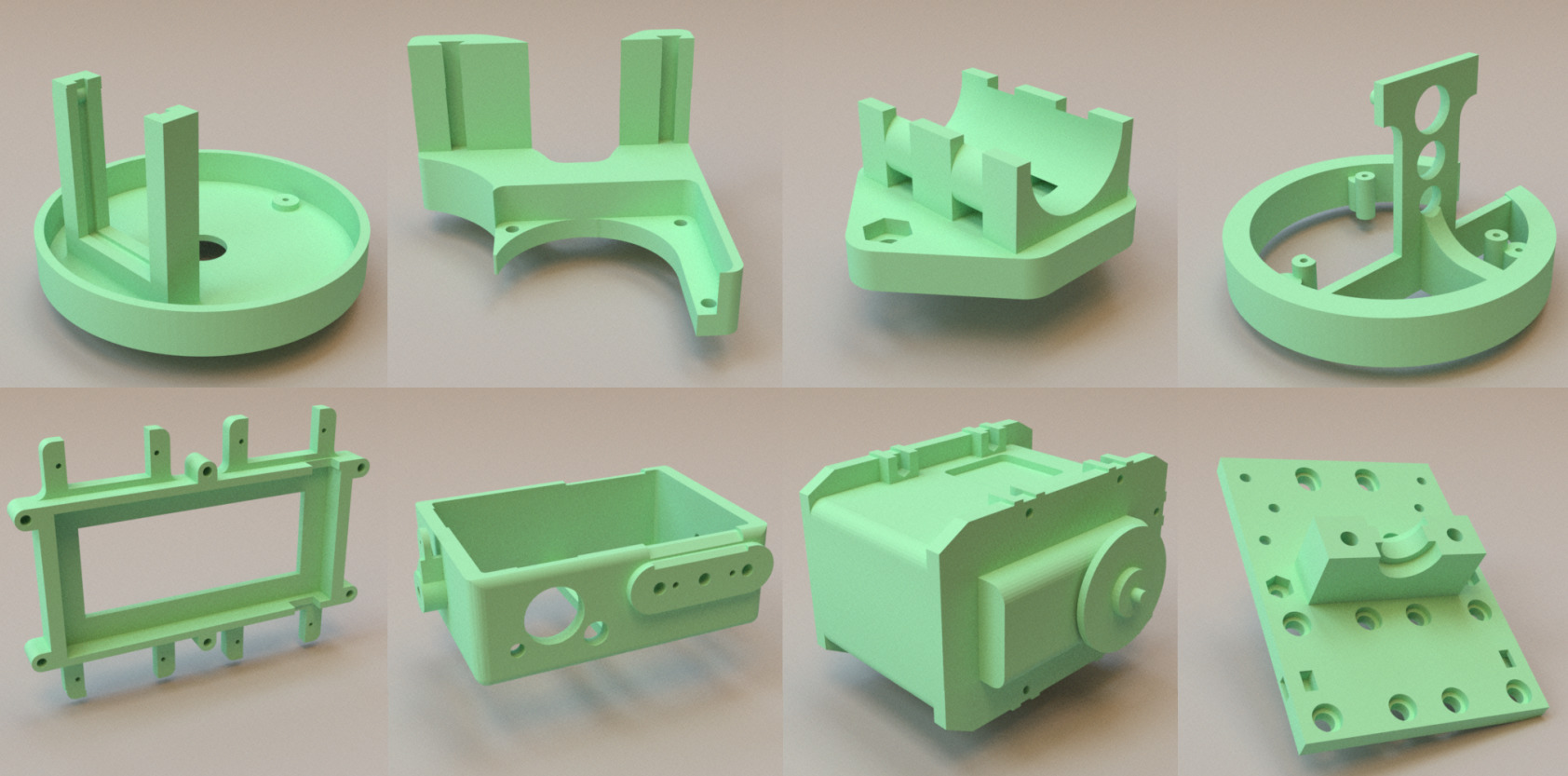
Fusion 360 Gallery: A Dataset and Environment for Programmatic CAD Reconstruction
, , , , Tao Du, , , . ACM Transactions on Graphics 2021 (SIGGRAPH 2021)
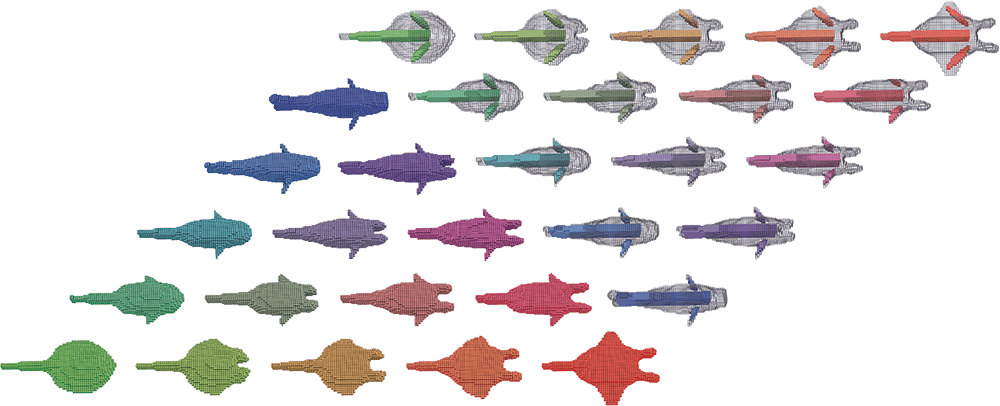
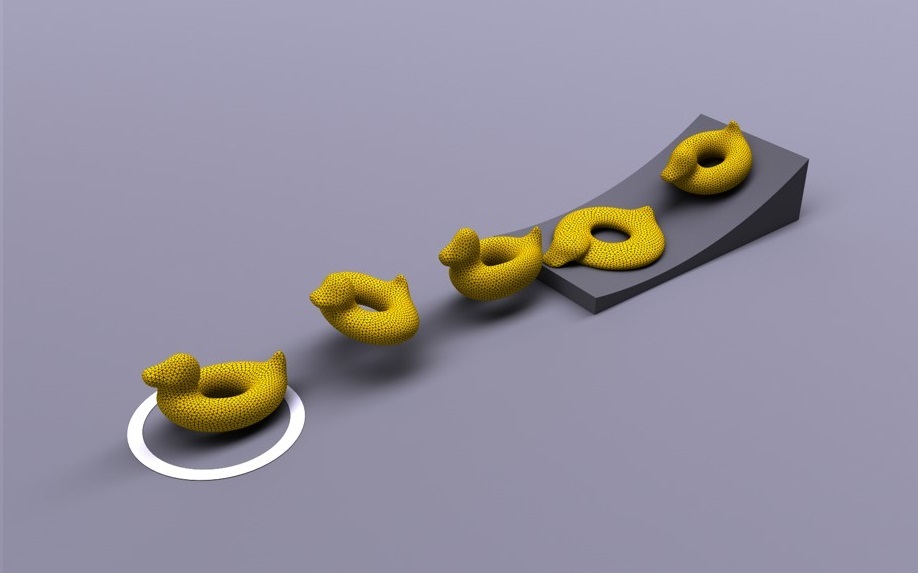
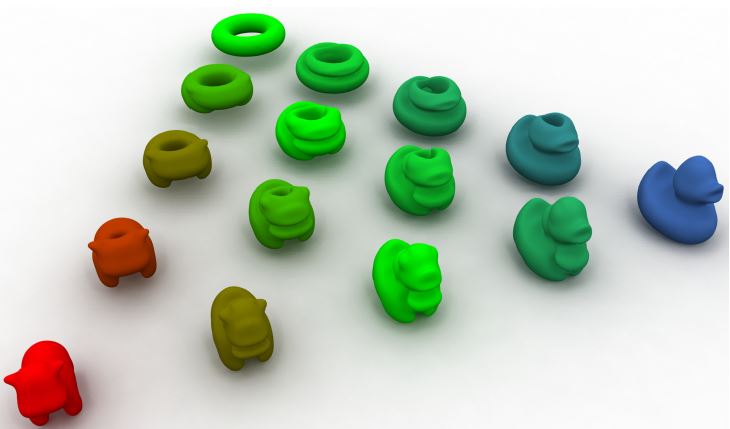
DiffAqua: A Differentiable Computational Design Pipeline for Soft Underwater Swimmers with Shape Interpolation
, Tao Du, , , , , . ACM Transactions on Graphics 2021 (SIGGRAPH 2021)
Underwater Soft Robot Modeling and Control with Differentiable Simulation
Tao Du*, *, , , . IEEE Robotics and Automation Letters 2021 (RoboSoft 2021)
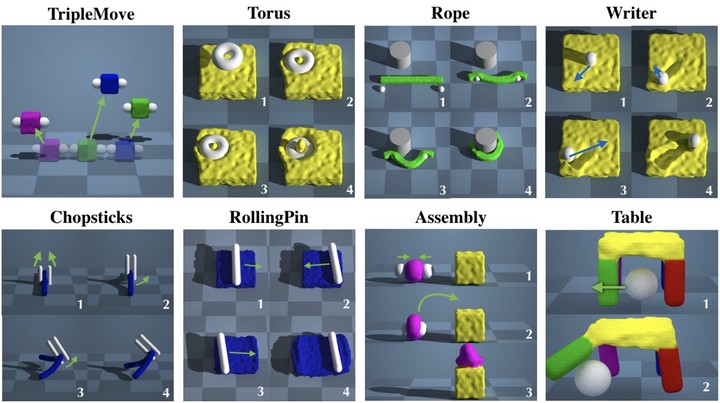
PlasticineLab: A Soft-Body Manipulation Benchmark with Differentiable Physics
, , Tao Du, Siyuan Zhou, , , . ICLR 2021 (Spotlight)
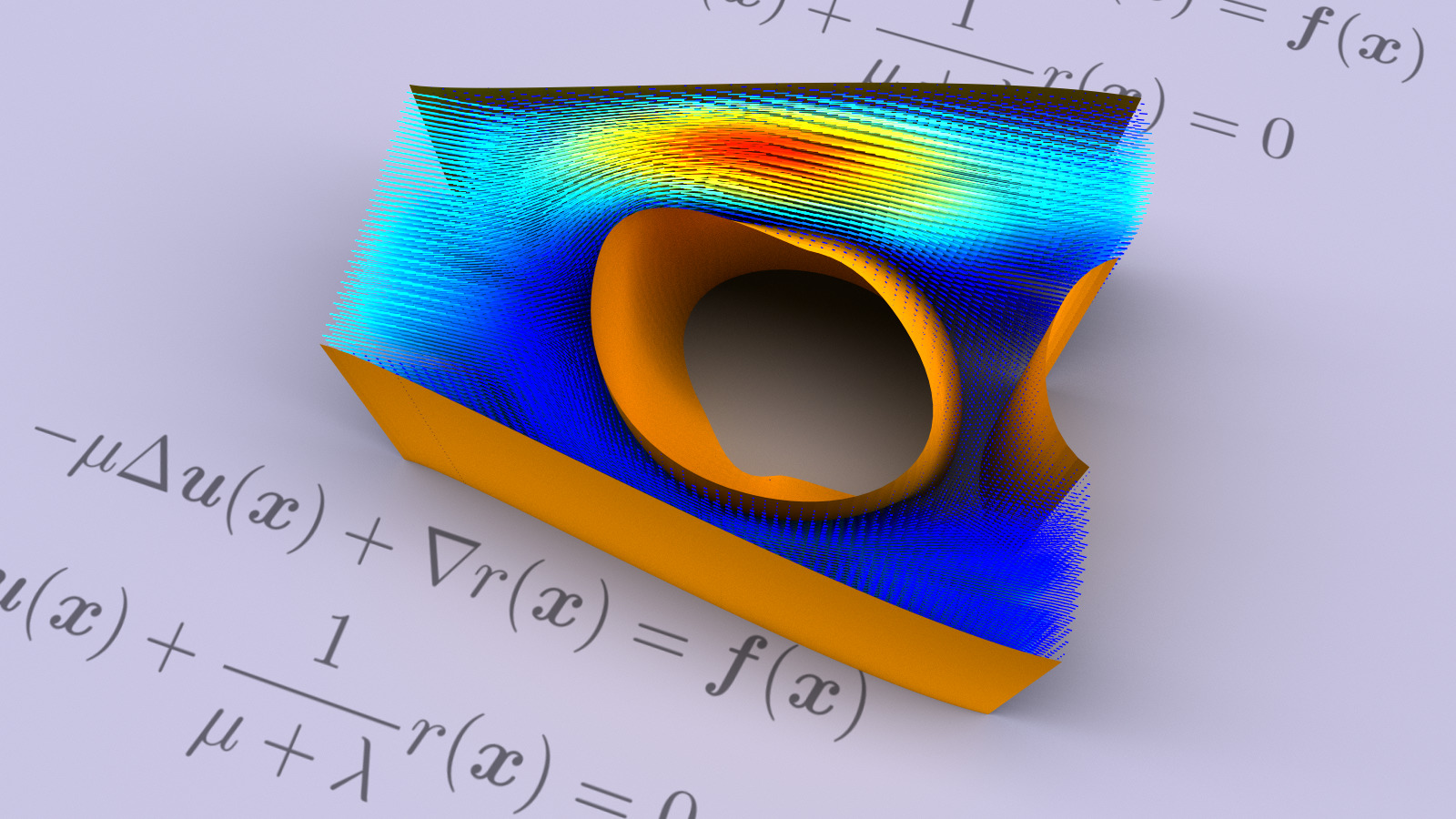
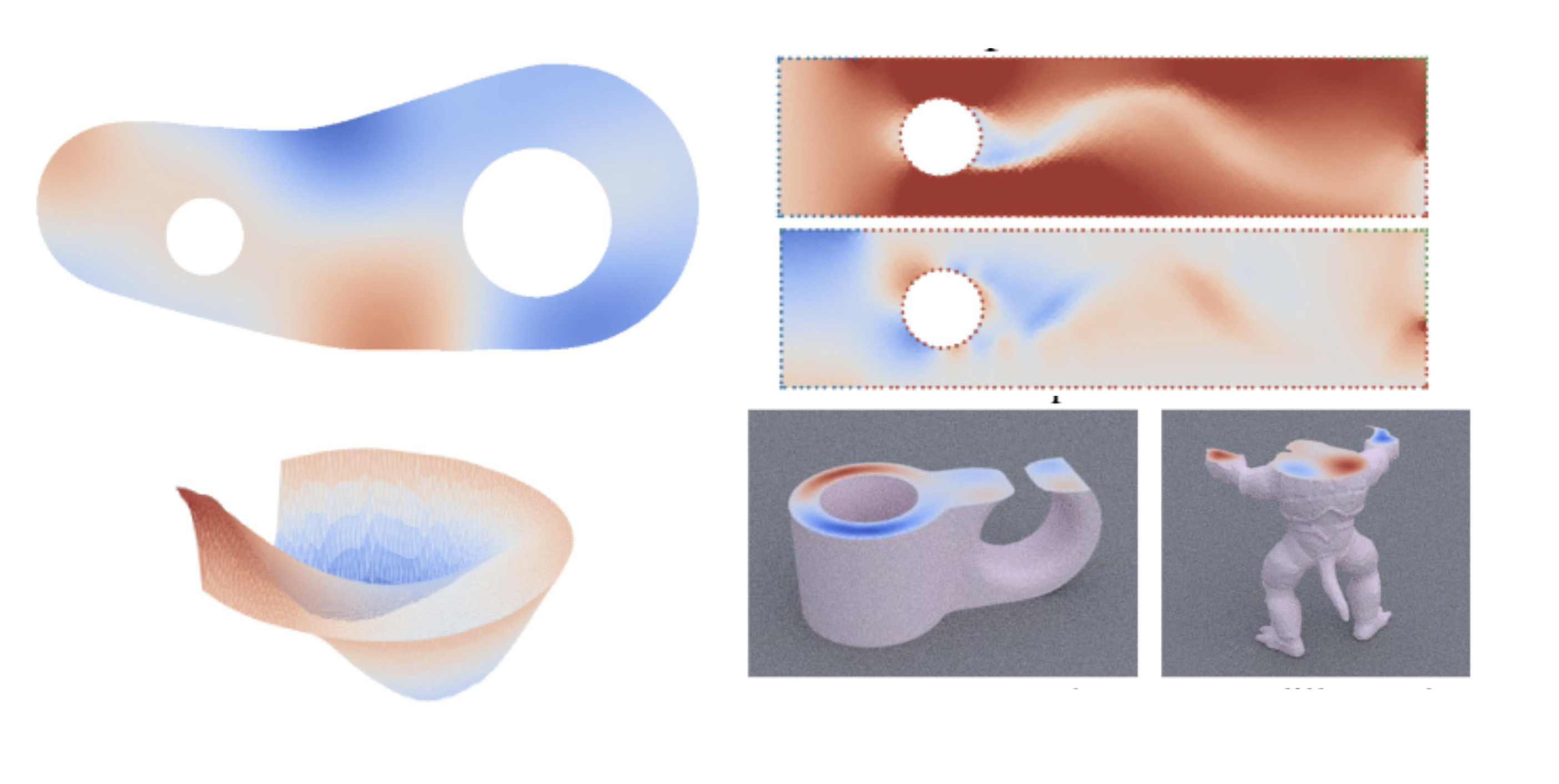
Functional Optimization of Fluidic Devices with Differentiable Stokes Flow
Tao Du, , , , , . ACM Transactions on Graphics 2020 (SIGGRAPH Asia 2020)
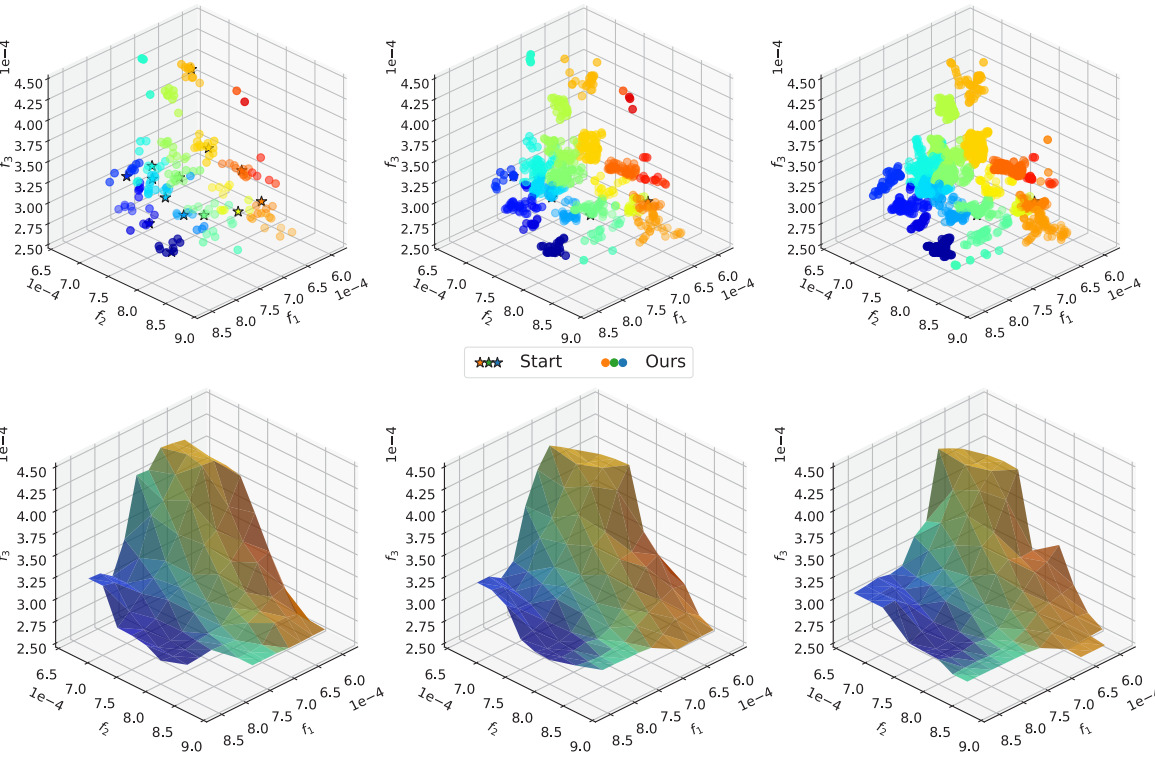
Efficient Continuous Pareto Exploration in Multi-Task Learning
*, Tao Du*, . ICML 2020
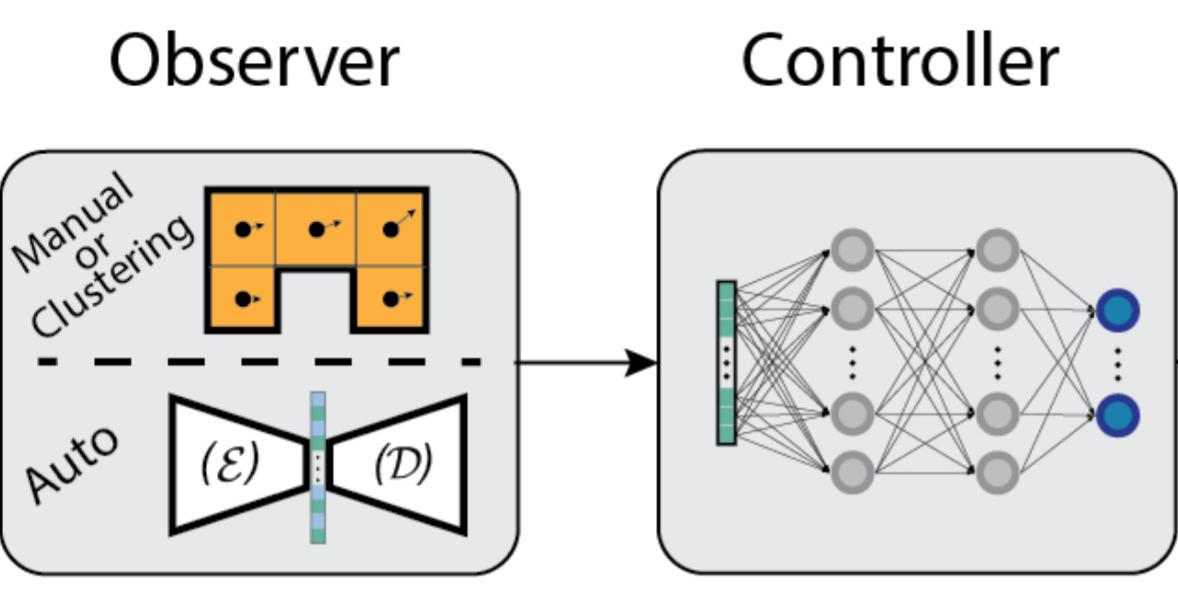
Learning-in-the-Loop Optimization: End-to-End Control and Co-Design of Soft Robots through Learned Deep Latent Representations
, , , Tao Du, , . NeurIPS 2019
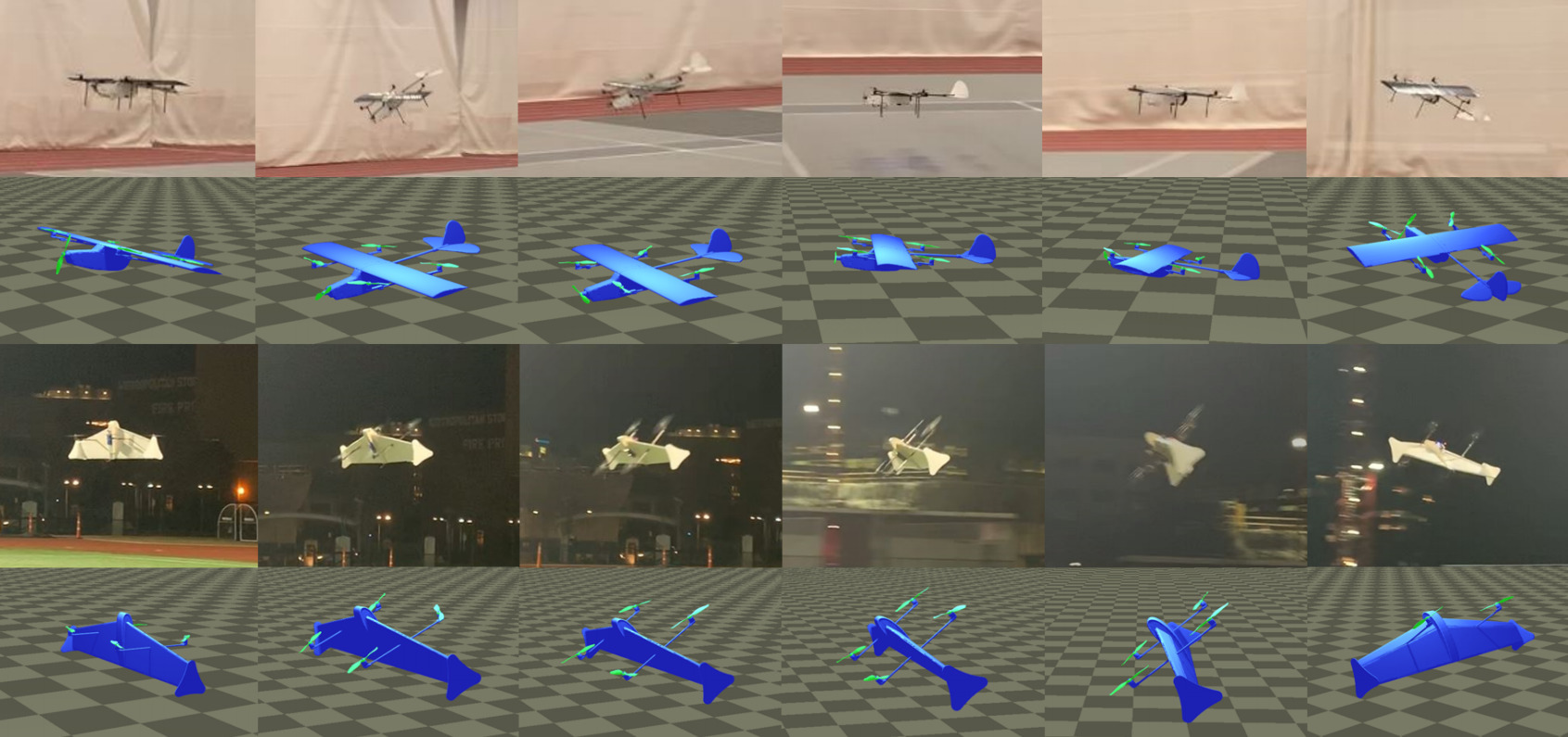
Learning to Fly: Computational Controller Design for Hybrid UAVs with Reinforcement Learning
, Tao Du, , , , , . ACM Transactions on Graphics 2019 (SIGGRAPH 2019)
InverseCSG: Automatic Conversion of 3D Models to CSG Trees
Tao Du, , , , , , , . ACM Transactions on Graphics 2018 (SIGGRAPH Asia 2018)

Computational Multicopter Design
Tao Du, , , , . ACM Transactions on Graphics 2016 (SIGGRAPH Asia 2016)
Convolutional Wasserstein Distances: Efficient Optimal Transportation on Geometric Domains
, , , , , , Tao Du, . ACM Transactions on Graphics 2015 (SIGGRAPH 2015)

Thesis
Differentiable Simulation Methods for Robotic Agent Design
Ph.D. thesis
Service
Program Committee: SIGGRAPH, SIGGRAPH Asia
Journal paper reviewer: TOG, TVCG, IJRR, T-RO, RA-L
Conference paper reviewer: SIGGRAPH, SIGGRAPH Asia, NeurIPS (Outstanding Reviewer), ICML (Outstanding Reviewer), ICLR, RSS
